Vehículos de conducción autónoma
Un vehículo autónomo es aquel que cuenta con las tecnologías para poder llevar a un usuario de un punto a otro en la ruta deseada, sin necesidad de la intervención humana en la conducción. Aquello significa que el vehículo puede imitar las habilidades humanas de manejo y control. Esto es posible a través de sensores, radares, GPS y visión computarizada que permiten al vehículo desplazarse de forma segura en la ruta e interpretar señaléticas relevantes y obstáculos. Existen 5 niveles de autonomía, donde el nivel 5 es la autonomía total. Hoy en día, los desarrollos se encuentran entre los niveles 2 y 3.
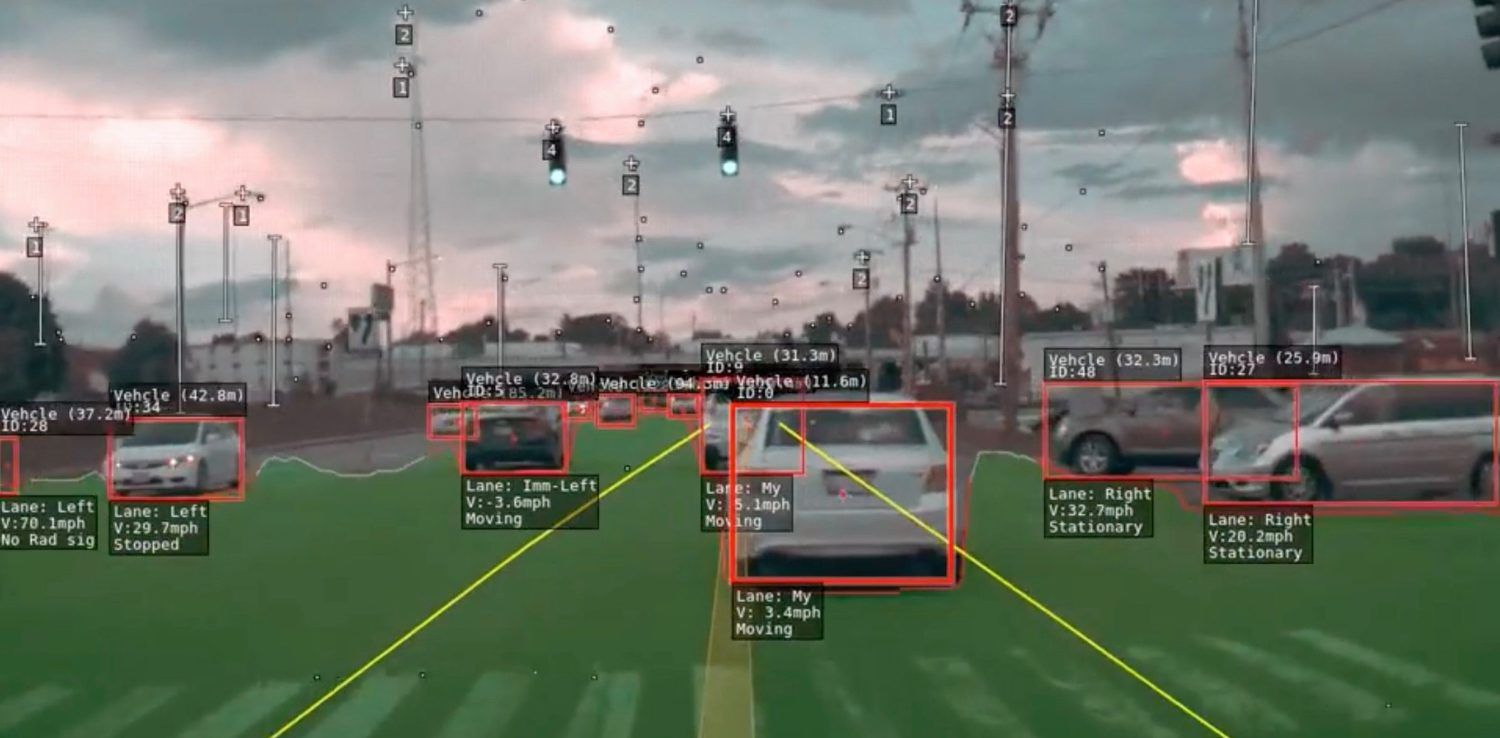
Vehículos reconocerán todo a su alrededor
Softwares de inteligencia artificial forman parte del desarrollo actual de la visión computarizada de los vehículos, para poder reconocer, procesar e interpretar las señales en la ruta y así simular las habilidades de conducción de un ser humano. Continuar el desarrollo de las telecomunicaciones, como lo es el 5G y computadores capaces de procesar metadatos son el paso siguiente hacia la implementación de esta tecnología
Nivel 0: Sin automatización en la conducción
Nivel 1: Asistencia en la conducción
Nivel 2: Automatización parcial
Nivel 3: Automatización condicionada
Nivel 4: Automatización elevada
Nivel 5: Automatización completa
Un paseo autónomo en Santiago de Chile
Entre enero y marzo 2020, existió un plan piloto de vehículo autónomo que operaba en un circuito al interior del parque O’Higgins. Se trataba de un minibús 100% eléctrico con capacidad para 12 pasajeros, cuyo recorrido (gratuito además) comprendía 800 metros con 3 paradas y un tiempo estimado de 8 minutos por ciclo.
Durante su funcionamiento, este plan piloto ha beneficiado principalmente a adultos mayores que frecuentan la zona del pueblito del Parque O’Higgins.
Para funcionar de manera autónoma, el minibús posee un sistema GPS de alta definición, un sistema de cámaras y sensores que identifican actividad en un radio de 18 metros y un sistema de comunicación 3G/4G. Además, el vehículo debe circular por un espacio de condiciones controladas con flujos no motorizados y un potencial flujo vehicular controlado y limitado.

Ministerio de Energía
Alameda 1449, Piso 13 y 14, Edificio
Santiago Downtown II, Santiago de Chile
+56 2 2 365 6800